











In der Welt der digitalen Elektronik und Ingenieurwissenschaften existieren Signale nicht im Vakuum. Sie reisen über Spuren, durch Gatter und in Prozessoren mit spezifischen zeitlichen Einschränkungen. Um zu verstehen, wie ein System funktioniert, müssen Ingenieure visualisieren, wie diese Signale sich im Laufe der Zeit verändern. Diese Visualisierung wird durch ein Zeitdiagramm erreicht. Für einen Anfänger können diese Diagramme wie komplexe Hieroglyphen erscheinen, sind aber tatsächlich das grundlegendste Werkzeug zum Debuggen und Entwerfen digitaler Logik.
Diese Anleitung bietet eine gründliche Aufschlüsselung von Zeitdiagrammen. Wir werden die Struktur eines Signals, die entscheidenden Parameter, die Zuverlässigkeit definieren, und die häufigen Fallen untersuchen, die zu Systemausfällen führen. Egal, ob Sie sich auf eine Prüfung vorbereiten oder Ihre erste Mikrocontroller-Schaltung entwerfen, das Verständnis dieser Diagramme ist unerlässlich.
🧠 Was ist ein Zeitdiagramm?
Ein Zeitdiagramm ist eine grafische Darstellung des Zustands digitaler Signale im Laufe der Zeit. Im Gegensatz zu einer Schaltungs-Skizze, die zeigtwasangeschlossen ist anwas, zeigt ein ZeitdiagrammwannDinge geschehen. Es stellt Spannungsniveaus gegen eine Zeitachse dar, sodass Ingenieure die Reihenfolge der Ereignisse sehen können.
Diese Diagramme sind aus mehreren Gründen unverzichtbar:
- Debugging: Sie zeigen Rennbedingungen auf, bei denen Signale aus der Reihenfolge kommen.
- Verifikation: Sie bestätigen, dass eine Schaltung die erforderlichen Geschwindigkeitsspezifikationen erfüllt.
- Dokumentation: Sie dienen als Referenz dafür, wie verschiedene Chips miteinander kommunizieren.
- Entwurf: Sie helfen dabei, die maximale Taktfrequenz zu bestimmen, die ein System unterstützen kann.
Wenn Sie ein Zeitdiagramm betrachten, betrachten Sie einen Schnappschuss des physikalischen Verhaltens von Elektronen, die durch ein System fließen. Es erfasst die Realität von Latenz, Ausbreitung und Synchronisation.
📊 Kernkomponenten eines Zeitdiagramms
Bevor Sie komplexe Wellenformen analysieren, müssen Sie die Bausteine verstehen. Jedes Zeitdiagramm besteht aus einigen grundlegenden Elementen.
1. Die Zeitachse
Die horizontale Achse stellt die Zeit dar. Sie fließt von links nach rechts. In der digitalen Schaltungstechnik wird diese Achse oft in Taktschleifen unterteilt, die durch senkrechte Gitterlinien markiert sind. Die Skala kann von Nanosekunden (ns) für Hochgeschwindigkeitsprozessoren bis zu Millisekunden (ms) für langsamere Steuerlogik variieren.
2. Die Spannungspegel-Achse
Die vertikale Achse stellt den logischen Zustand des Signals dar. In Standard-Logikfamilien ist dies meist binär:
- Logisch Hoch (1):Oft dargestellt als VCC oder 5V.
- Logisch Niedrig (0): Oft dargestellt als Masse oder 0V.
- High-Z (Hohe Impedanz): Ein Zustand, in dem der Pin effektiv getrennt ist, üblich in Bussystemen.
3. Signalleitungen
Jede horizontale Linie stellt einen bestimmten Draht oder Signalnamen dar. Diese Linien sind eindeutig beschriftet (z. B. CLK, DATA_IN, CS), um festzustellen, welcher Teil der Schaltung überwacht wird.
🔄 Signalübergänge lesen
Die Bewegung der Signalleitung nach oben und unten ist der Ort, an dem die Daten liegen. Das Verständnis der Richtung dieser Bewegungen ist entscheidend.
⬆️ Anstiegsflanke
Eine Anstiegsflanke tritt auf, wenn ein Signal von Low auf High wechselt. In der binären Logik ist dies oft der Auslösepunkt für viele Operationen. Sie stellt einen Wechsel von 0 auf 1 dar.
⬇️ Abfallflanke
Eine Abfallflanke tritt auf, wenn ein Signal von High auf Low wechselt. Dies stellt einen Wechsel von 1 auf 0 dar.
⚡ Flankenauslöseverhalten
Viele digitale Bauteile, wie Flip-Flops, reagieren nur auf diese Flanken und nicht auf den stabilen Zustand. Ein Flip-Flop könnte Daten nur an der Anstiegsflankeeines Taktsignals erfassen. Wenn Sie die Flanke verpassen, geht die Daten verloren.
| Übergang | Richtung | Binärer Wechsel | Häufiger Auslösetyp |
|---|---|---|---|
| Anstiegsflanke | Low ➔ High | 0 ➔ 1 | Positiv flankengetriggert |
| Abfallflanke | High ➔ Low | 1 ➔ 0 | Negativ flankengetriggert |
| Hochpegel | Stabiler Hochpegel | Stabiler 1 | pegelabhängig |
| Niedriger Pegel | Stabiler niedriger Pegel | Stabiler 0 | pegelabhängig |
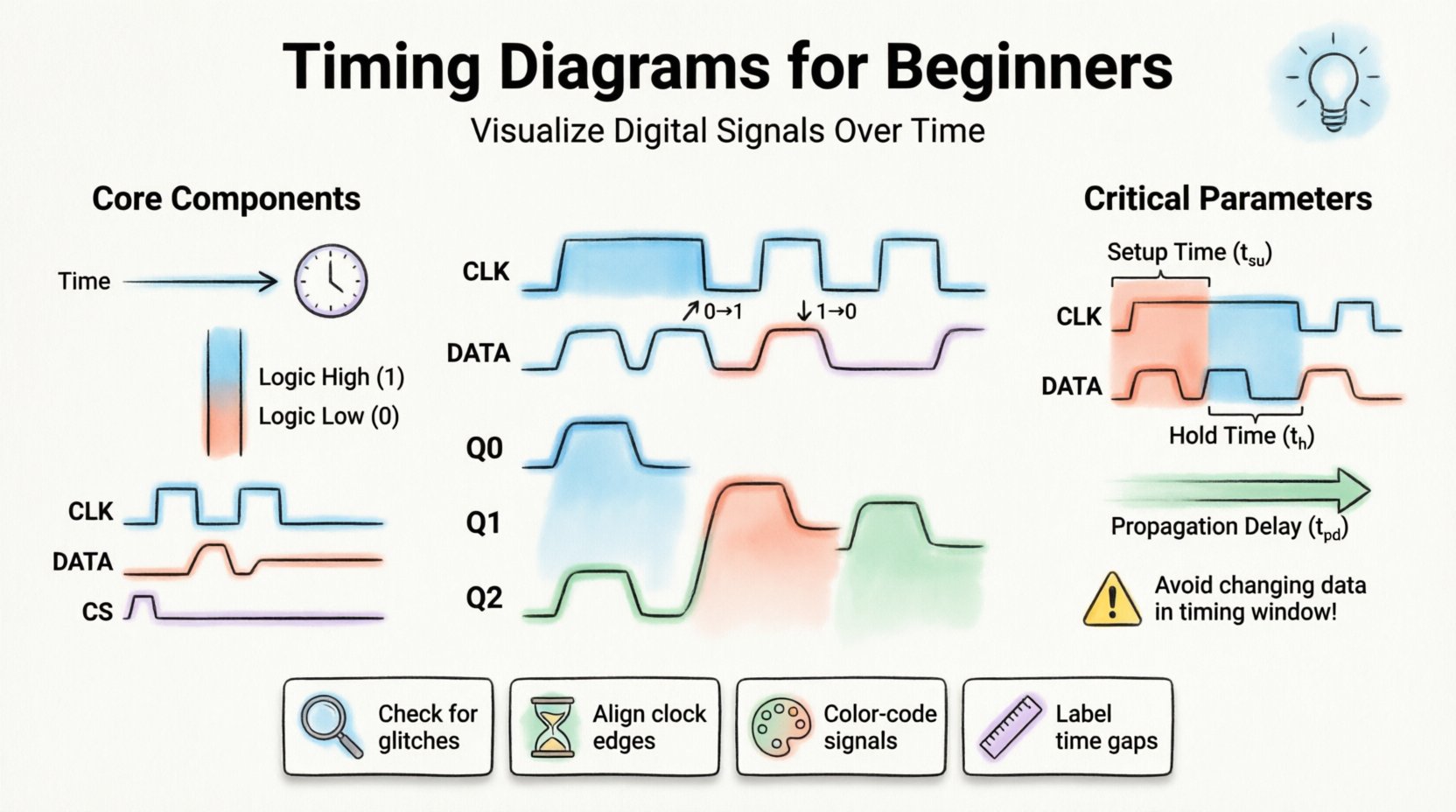
⏳ Kritische Zeitparameter
Zeitdiagramme sind nicht nur Bilder; sie enthalten Messwerte. Der Abstand zwischen Signaländerungen bestimmt die Zuverlässigkeit. Drei spezifische Parameter dominieren die digitale Zeitanalyse.
1. Propagationsverzögerung (tpd)
Signale reisen nicht sofort. Wenn sich eine Eingabe ändert, vergeht eine endliche Zeit, bis sich die Ausgabe entsprechend ändert. Dies ist die Propagationsverzögerung. Sie wird durch den physikalischen Widerstand und die Kapazität der Materialien verursacht.
- Definition: Die Zeitspanne zwischen der Änderung der Eingabe und der Änderung der Ausgabe.
- Auswirkung: In einer Kette von Logikgattern addieren sich die Verzögerungen. Wenn die Verzögerung zu groß ist, könnte das Signal nach Beginn des nächsten Taktszyklus eintreffen und zu Fehlern führen.
2. Setup-Zeit (tsu)
Die Setup-Zeit ist die Anforderung, dass ein Datensignal stabil sein mussvor dass der Taktflankeneintritt erfolgt. Wenn sich die Daten zu nahe an der Taktflanke ändern, kann die empfangende Schaltung sie nicht korrekt erfassen.
- Regel: Der Datenwert muss für eine bestimmte Dauer vor dem Takt ausgelöst werden gültig sein.
- Visuell: In einem Diagramm ist dies der Abstand zwischen der Stabilisierung der Datenspur und der Taktflanke.
3. Hold-Zeit (th)
Die Hold-Zeit ist die Anforderung, dass das Datensignal stabil bleiben mussnach wenn die Taktränder eintrifft. Wenn die Daten unmittelbar nach der Taktränder ändern, könnte die Schaltung den korrekten Wert möglicherweise nicht erfassen.
- Regel:Die Daten müssen für eine bestimmte Dauer nach dem Auslösen des Taktes unverändert bleiben.
- Visuell:In einer Darstellung ist dies die Lücke zwischen der Taktränder und der nächsten Datenübertragung.
⚠️ Das Zeitfenster
Die Kombination aus Setup- und Hold-Zeit schafft ein gültiges Fenster zum Erfassen von Daten. Wenn Ihr Zeitdiagramm zeigt, dass die Daten innerhalb dieses Fensters wechseln, ist das System gefährdet, zu versagen.
⚡ Synchron vs. Asynchron Systeme
Zeitdiagramme unterscheiden sich erheblich je nach Architektur des Systems.
Synchron Systeme
Bei synchroner Gestaltung werden alle Operationen durch ein globales Taktsignal koordiniert. Jeder Zustandswechsel erfolgt an der Flanke dieses Taktes. Zeitdiagramme für diese Systeme wirken sehr regelmäßig.
- Eigenschaften:Vorhersehbar, einfacher zu entwerfen, begrenzt durch die Taktfrequenz.
- Diagramm-Aussehen:Vertikale Gitterlinien stimmen perfekt mit allen Signaländerungen überein.
Asynchrone Systeme
Bei asynchroner Gestaltung gibt es kein globales Taktsignal. Signale ändern sich, sobald sich die Eingaben ändern. Dies bietet ein höheres Geschwindigkeitspotenzial, macht die Zeitanalyse aber viel schwieriger.
- Eigenschaften:Schneller Reaktion auf Eingaben, komplexere Gefahrenanalyse.
- Diagramm-Aussehen:Signalübergänge treten in unregelmäßigen Abständen auf. Sie müssen die genauen Zeitabstände zwischen Ereignissen messen.
📝 Wie man ein Zeitdiagramm zeichnet
Die Erstellung eines Zeitdiagramms ist ein systematischer Prozess. Befolgen Sie diese Schritte, um eine Schaltung zu dokumentieren oder ein Design zu überprüfen.
- Identifizieren Sie die Signale:Listen Sie alle Eingaben, Ausgaben und internen Steuerleitungen auf. Kennzeichnen Sie sie eindeutig.
- Stellen Sie die Zeitbasis fest:Entscheiden Sie sich für die Zeitskala. Bei Logikschaltungen sind Taktrunden normalerweise die Standard-Einheit.
- Zeichnen Sie den Takt:Zeichnen Sie immer zuerst das Taktsignal. Es dient als Bezugspunkt für alle anderen Ereignisse.
- Karten Sie die Eingaben Zeichnen Sie die Eingangssignale basierend auf der logischen Operation oder dem Testverlauf.
- Berechnen Sie die Verzögerungen: Verschieben Sie die Ausgangssignale rechts basierend auf der Propagationsverzögerung der beteiligten Gatter.
- Überprüfen Sie die Einschränkungen:Stellen Sie sicher, dass Setup- und Haltezeiten für jedes Flip-Flop erfüllt sind.
- Überprüfen Sie die Übergänge:Stellen Sie sicher, dass keine Glitches auftreten. Ein Glitch ist ein kurzer, unbeabsichtigter Impuls, der die Logik falsch auslösen kann.
🔄 Reales Beispiel: Ein einfacher Zähler
Um zu verstehen, wie diese Konzepte zusammenarbeiten, betrachten Sie einen einfachen 3-Bit-Binärzähler. Diese Schaltung erhöht ihren Wert jedes Mal, wenn das Taktsignal pulst.
Stellen Sie sich drei Ausgangslinien vor: Q0, Q1 und Q2. Q0 wechselt bei jedem Taktyzyklus. Q1 wechselt jedes Mal, wenn Q0 einen vollständigen Zyklus abgeschlossen hat. Q2 wechselt jedes Mal, wenn Q1 einen vollständigen Zyklus abgeschlossen hat.
Schritt-für-Schritt-Analyse
- Takt (CLK): Eine Rechteckwelle mit einem Tastverhältnis von 50 %.
- Q0 (LSB): Wechselt den Zustand bei jedem steigenden Flank des Taktsignals. Die Frequenz beträgt die Hälfte des Taktsignals.
- Q1: Wechselt den Zustand bei jedem steigenden Flank von Q0. Die Frequenz beträgt die Hälfte von Q0.
- Q2 (MSB): Wechselt den Zustand bei jedem steigenden Flank von Q1. Die Frequenz beträgt die Hälfte von Q1.
Wenn Sie dies zeichnen, werden Sie einen Rippel-Effekt bemerken. Q0 ändert sich zuerst. Q1 wartet, bis Q0 stabilisiert ist, bevor es sich ändert. Q2 wartet auf Q1. Diese Akkumulation von Verzögerungen ist das Wesen eines Rippelzählers.
| Taktyzyklus | Q2 | Q1 | Q0 | Dezimalwert |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 1 | 1 |
| 3 | 0 | 1 | 0 | 2 |
| 4 | 0 | 1 | 1 | 3 |
| 5 | 1 | 0 | 0 | 4 |
⚠️ Häufige Fehler, die vermieden werden sollten
Selbst erfahrene Ingenieure können Fehler beim Lesen von Zeitdiagrammen machen. Seien Sie sich dieser häufigen Fehler bewusst.
- Ignorieren von Störimpulsen: Ein kurzer Impuls ist möglicherweise nicht sichtbar, wenn die Zeitskala zu groß ist, kann aber eine Speicherzelle auslösen. Prüfen Sie immer auf schmale Impulse.
- Falsche Deutung des Tastverhältnisses: Annahme, dass ein Takt 50 % beträgt, obwohl er tatsächlich verzerrt ist. Dies beeinflusst das Zeitfenster.
- Übersehen von High-Z-Zuständen: In Bus-Systemen schweben Leitungen. Ein Zeitdiagramm muss zeigen, wann eine Leitung getrieben wird und wann sie schwebt.
- Verwechseln von Setup und Hold: Setup erfolgt vor der Flanke; Hold erfolgt danach. Die Verwechslung führt zu falschen Schaltungsdesigns.
- Vernachlässigung der Erdungsreferenz: Alle Spannungsniveaus müssen relativ zur gleichen Erdung gemessen werden. Wenn die Erdungen unterschiedlich sind, sind die Logikniveaus ungültig.
🛠 Best Practices für die Dokumentation
Beim Erstellen von Zeitdiagrammen zur Dokumentation oder Fehlersuche sollten diese Richtlinien befolgt werden, um Klarheit zu gewährleisten.
- Verwenden Sie eine konsistente Skalierung: Stellen Sie sicher, dass die Zeitachse linear ist. Komprimieren Sie nicht einen Abschnitt und dehnen Sie einen anderen aus, es sei denn, dies ist ausdrücklich gekennzeichnet.
- Kritische Flanken ausrichten: Stellen Sie sicher, dass die Taktfrequenz genau mit dem Abtastpunkt der Daten übereinstimmt.
- Lücken beschriften: Wenn eine Verzögerung vorliegt, beschriften Sie sie mit dem spezifischen Zeitwert (z. B. tpd = 5 ns).
- Farbcodierung: Verwenden Sie unterschiedliche Farben für verschiedene Signalarten (z. B. blau für Takt, rot für Daten, grün für Steuerung).
- Aktive Zustände markieren: Geben Sie deutlich an, ob ein Signal aktiv High oder aktiv Low ist (z. B. durch eine Linie über den Namen wie /CS).
🧩 Metastabilität und Zeitverzögerungsrisiken
Fortgeschrittene Zeitdiagramme zeigen oft ein Phänomen namens Metastabilität. Dies tritt auf, wenn ein Signal genau im Setup-/Hold-Fenster eines Flip-Flops wechselt. Der Ausgang setzt sich nicht sofort auf 0 oder 1 fest; er bleibt auf einem Zwischenspannungsniveau.
Obwohl selten, kann Metastabilität zu Systemabstürzen führen. Zeitdiagramme helfen dabei, dies vorherzusagen, indem sie die Beziehung zwischen asynchronen Eingängen und dem synchronen Takt zeigen. Wenn ein externes Signal zu nahe an der Taktränder wechselt, zeigt das Diagramm, dass die Daten zur falschen Zeit die Schwelle überschreiten.
🔍 Analyse von echten Daten
Wenn Sie ein Zeitdiagramm betrachten, das von einem Logikanalysator erzeugt wurde, sind die Linien selten perfekte Quadrate. Echte Signale weisen folgende Eigenschaften auf:
- Anstiegszeit: Die Zeit, die benötigt wird, um von Low nach High zu wechseln. Dies ist selten sofort gegeben.
- Abfallzeit: Die Zeit, die benötigt wird, um von High nach Low zu wechseln.
- Überschwingen/Unterschwingen: Spannungsspitzen, die die Versorgungsspannungen überschreiten.
- Jitter: Schwankungen in der Zeitpunkte der Signalflanken.
Das Verständnis dieser Unzulänglichkeiten ist entscheidend für die Hochgeschwindigkeitsentwicklung. Ein perfektes Rechtecksignal ist ein theoretisches Ideal; echte Signale sind analoge Wellenformen, die digitale Logik darstellen.
📚 Zusammenfassung der wichtigsten Erkenntnisse
Zeitdiagramme sind die Sprache der digitalen Zeitsteuerung. Sie übersetzen abstrakte Logik in physische Realität. Durch ihre Beherrschung erlangen Sie die Fähigkeit zu:
- Den Datenfluss durch ein System visuell darzustellen.
- Zu erkennen, wo Signale möglicherweise konflikten.
- Sicherzustellen, dass Daten zuverlässig erfasst werden.
- Die maximale Betriebsgeschwindigkeit einer Schaltung zu berechnen.
Beginnen Sie mit der Übung an einfachen Logikgattern. Zeichnen Sie die Eingabe, berechnen Sie die Verzögerung und zeichnen Sie die Ausgabe. Mit zunehmender Fortschritte wechseln Sie zu komplexen Bussen und Taktdomänen. Mit Geduld und Übung wird das Lesen dieser Diagramme Ihnen zur zweiten Natur werden.
🚀 Weiter geht’s
Fahren Sie fort, die Feinheiten der Signalintegrität und der Taktausbreitungsnetzwerke zu erforschen. Je schneller die Systeme werden, desto kleiner werden die Zeitabstände. Die Fähigkeit, Zeitdiagramme genau zu lesen, bleibt eine zentrale Kompetenz für jeden Ingenieur, der mit digitaler Hardware arbeitet.